Research Question: How is the position of a cart effected by time as it rolls down an incline
Independent Variable: Time
Dependent Variable: Position of the cart
Controls: Incline of ramp, mass of cart, surface of ramp
Independent Variable: Time
Dependent Variable: Position of the cart
Controls: Incline of ramp, mass of cart, surface of ramp
Procedure and lab setup
Our group decided to use motion sensor for its accuracy, large amount of data, and its ease of use when collecting the data in this lab.
Example of a trial being done
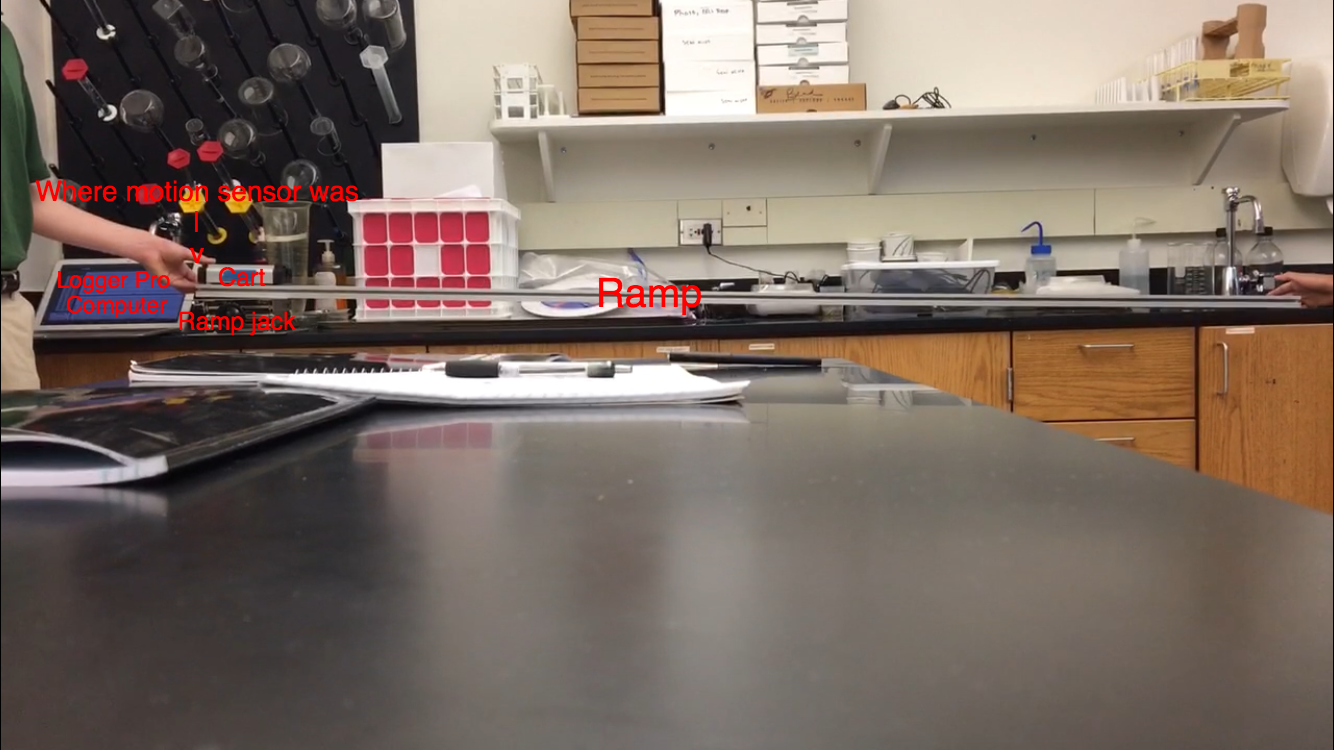
Procedure
- Connect motion sensor to computer running logger pro
- Place and hold cart at top of ramp
- Release cart 10cm away from motion sensor
- Start motion sensor to collect data (Time (IV) and position relative to motion sensor (DV))
- Catch cart at bottom of ramp and stop motion sensor
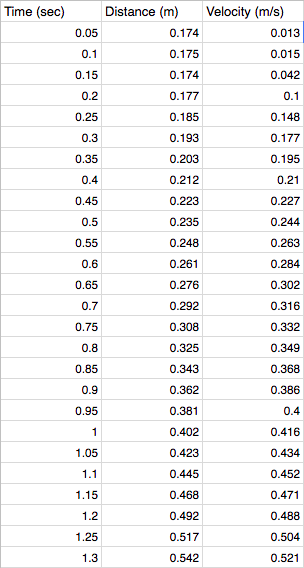
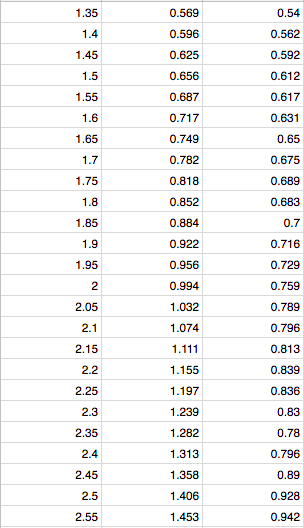
Data
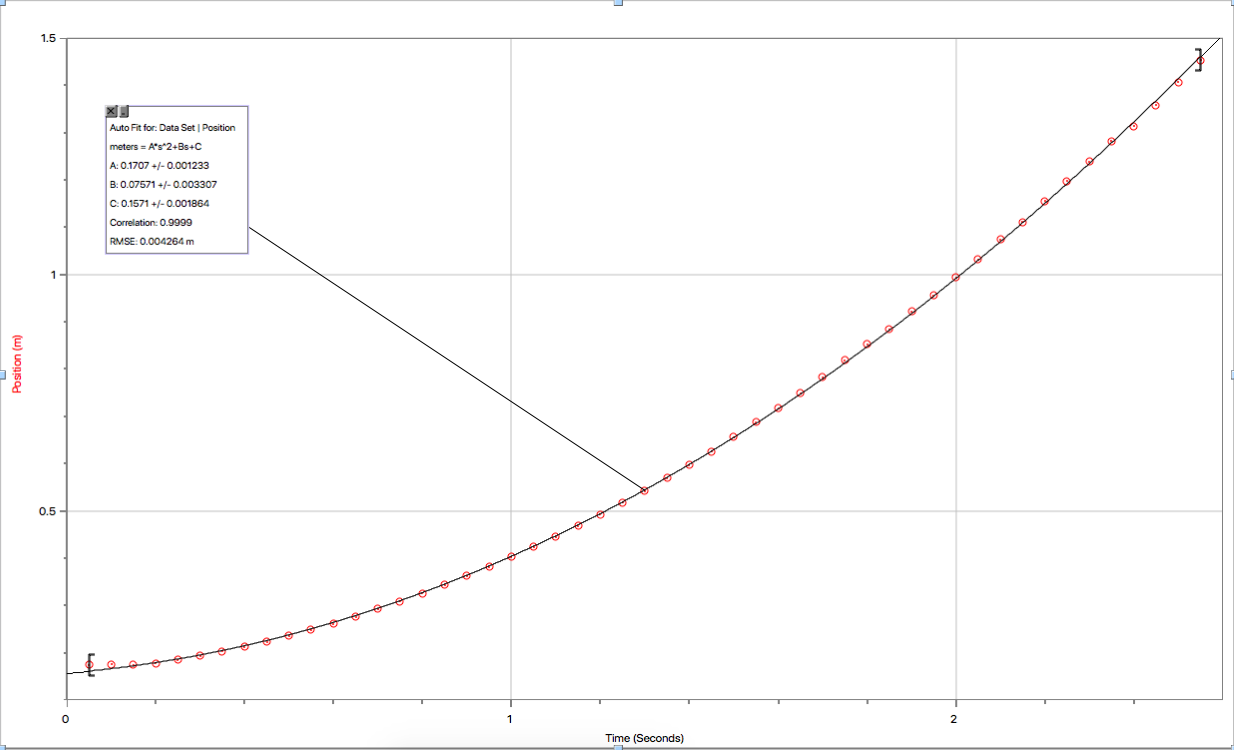
Position Time Graph
Equation for position of cart:
Position in meters = 0.1707 +/- 0.001233 time in seconds^2 + 0.07571 +/- 0.003307 time in seconds + 0.1571 +/- 0.001864 m
Equation for position of cart:
Position in meters = 0.1707 +/- 0.001233 time in seconds^2 + 0.07571 +/- 0.003307 time in seconds + 0.1571 +/- 0.001864 m
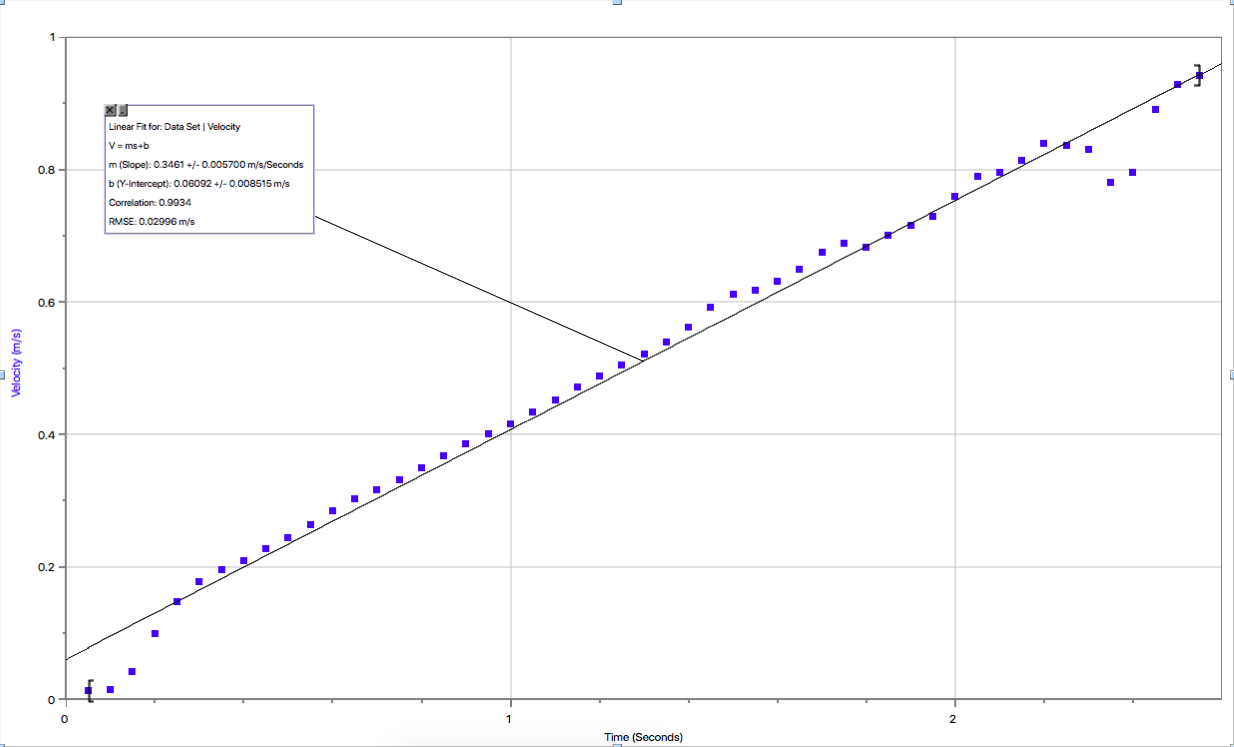
Velocity time graph
Equation for velocity of cart;
Velocity in m/s = 0.3461 +/- 0.0057 m/s/s * Time + 006092 +/- 0.06092 m/s
As can be seen the motion sensor had tracking issues at the very beginning and around 2.5 seconds that skewed our data slightly
Equation for velocity of cart;
Velocity in m/s = 0.3461 +/- 0.0057 m/s/s * Time + 006092 +/- 0.06092 m/s
As can be seen the motion sensor had tracking issues at the very beginning and around 2.5 seconds that skewed our data slightly
Conclusion
This lab is an extension of the buggy lab with the same variables except this time instead of a constant velocity the cart has an increasing velocity and a constant acceleration. The position time graph fits a quadratic curve with the equation Position in meters = 0.1707 +/- 0.001233 time in seconds^2 + 0.07571 +/- 0.003307 time in seconds + 0.1571 +/- 0.001864 m. This shows that the cart is accelerating away from the motion sensor as the line is getting steeper and x is increasing. The velocity time graph has a linear fit with the equation velocity in m/s = 0.3461 +/- 0.0057 m/s/s * Time + 006092 +/- 0.06092 m/s. Because the slope of a velocity time graph is acceleration this shows that the cart has a constant acceleration as it goes down the ramp. This information can be applied to the real world to show that on a constant surface at a constant slope something rolling down will have an increasing velocity and constant acceleration.
Our two largest sources of uncertainty were reaction time with starting the motion sensor at the same time as releasing the cart and the issues with motion sensor tracking. There will also be some reaction time delay with anything a human does so it is impossible to release the cart and start the motions sensor at the same time creating and error. Another source of uncertainty was the bad tracking of the motion sensor. The motion sensor failed to collect accurate data at the beginning of the test and after 2.5 seconds. This inaccuracy slightly shifted the best fit lines for their graphs skewing our data slightly.
One way that this lab could be improved upon would be a more accurate motion sensor. While it is accurate and works well it can be seen at the beginning and the end of the data that it is not perfect. A motion sensor that can measure closer to the sensor to eliminate inaccuracies at the start of the lab and one that can measure further more accurately would allow us to have more more accurate data points to improve our accuracy in the lab and our conclusions.
Our two largest sources of uncertainty were reaction time with starting the motion sensor at the same time as releasing the cart and the issues with motion sensor tracking. There will also be some reaction time delay with anything a human does so it is impossible to release the cart and start the motions sensor at the same time creating and error. Another source of uncertainty was the bad tracking of the motion sensor. The motion sensor failed to collect accurate data at the beginning of the test and after 2.5 seconds. This inaccuracy slightly shifted the best fit lines for their graphs skewing our data slightly.
One way that this lab could be improved upon would be a more accurate motion sensor. While it is accurate and works well it can be seen at the beginning and the end of the data that it is not perfect. A motion sensor that can measure closer to the sensor to eliminate inaccuracies at the start of the lab and one that can measure further more accurately would allow us to have more more accurate data points to improve our accuracy in the lab and our conclusions.
